Einzelgespräch mit Martin McDonald, SVP, ROV Division, Oceaneering

Martin McDonald, Senior Vice President der ROV-Abteilung von Oceaneering International. Mit freundlicher Genehmigung von Oceaneering International

Freiheitsfahrzeug von Oceaneering, das einen Unterseebaum inspiziert. Mit freundlicher Genehmigung von Oceaneering International

Das ROV-Angebot von Oceaneering mit Fahrzeugen der nächsten Generation, Freedom und E-ROV, ist enthalten. Mit freundlicher Genehmigung von Oceaneering International
Martin McDonald, ein Branchenveteran mit mehr als 35 Jahren Erfahrung, ist für das weltweite ROV-Geschäft von Oceaneering verantwortlich. Mit einem breiten Erfahrungsschatz von ROVs - vom Betrieb über die Reparatur bis zur Instandhaltung und zum Management - teilt McDonald MTR seine Einblicke in die historische Entwicklung und die Zukunftsaussichten dieses hochkarätigen Unterwassersektors mit.
Wie und wann wussten Sie, dass Ihre Karriere in der maritimen / Unterwasserbranche liegen würde?
Ich bin in Fraserburgh, Schottland, einer kleinen Stadt, 40 Meilen nördlich der Ölfeldstadt Aberdeen, aufgewachsen. Fraserburgh ist am besten für das kommerzielle Fischen bekannt. Mein Vater war Bootsbauer und schon früh faszinierte mich die maritime Industrie, also handelte es sich um kommerzielles Fischen oder um das Ölfeld. Ich habe mich für das Ölfeld und insbesondere für die Unterwasserindustrie entschieden. Ich studierte Elektrotechnik und Elektrotechnik an der Hochschule und begann meine Karriere bei einem Unterwasser-Konstruktions- und Tauchunternehmen als hydrografischer Vermessungsingenieur, der an Positionierungs- und Navigationsgeräten arbeitete. Dieses Unternehmen verfügte auch über eine kleine Flotte von ROVs (damals eine aufkommende Technologie). Ich interessierte mich für diese Technologie und die vielfältigen Arbeitsbereiche, in die ROVs eingebunden werden konnten, und das Potenzial, das sie weiterentwickeln mussten. Später wechselte ich zur Vollzeitarbeit an ROVs und den zugehörigen Sensoren.
Der Name Oceaneering ist allgemein bekannt, aber Sie können die Größe und den Umfang des Oceaneering-ROV-Angebots angeben.
Derzeit verfügen wir über 275 ROVs der Arbeitsklasse in unserer Flotte, der weltweit größten Flotte von ROVs der Arbeiterklasse, und wir betreiben 60 ROVs der Beobachtungsklasse. Der Geschäftsbereich ROV beschäftigt rund 2.400 Vollzeitkräfte, die Mehrheit (rund 2.000) ist im Außendienst tätig. Mit ROVs tauchen wir jeden Tag über 100.000 Missionen in einem Jahr mit unterschiedlicher Dauer und Intensität.
Der (Offshore-Energie-) Abschwung hat das Aktivitätsniveau auf natürliche Weise reduziert, und wie bei anderen Märkten (Schiffe und Bohrinseln) haben wir Einheiten im Ruhestand, die das Ende ihres Arbeitslebens erreicht haben. Unsere Flottenanzahl erreichte 2014 ihren Höchststand bei 318 ROVs der Arbeiterklasse. Während wir ROVs entfernt haben, fügen wir auch Einheiten hinzu, so dass wir heute bei net-net bei 275 ROVs (Arbeiterklasse) sind.
Gibt es beim Hinzufügen von Einheiten eine bestimmte Technologie, die am wichtigsten ist?
Ja, wenn wir Einheiten hinzufügen, rüsten wir sie mit den neuesten Technologien auf, z. B. mit den neuesten Steuersystemen, Navigationssensoren, Software, Pumppaketen und Interventionsgeräten.
Gibt es in Bezug auf Fahrzeuge der Inspektionsklasse, Inspektionsklasse und Beobachtungsklasse noch Produktlücken, die noch gefüllt werden müssen?
Wir haben einige Marktlücken festgestellt. Im weiteren Verlauf kommen Autonomie, Fernbedienungen, Geschwindigkeit und Zuverlässigkeit ins Spiel. Die Chance ergibt sich aus der Reduzierung der Entwicklungskosten für unsere Kunden. Wir sehen mehr abgelegene und autonome Operationen, die im Einklang mit dem Branchenfokus stehen, das Personalrisiko und die CO2-Emissionen durch weniger Anlagen am Arbeitsplatz zu reduzieren.
Darüber hinaus besteht Bedarf an spezielleren Geräten. Heute arbeiten ROVs in immer tieferen Gewässern an immer komplexer werdenden Arbeitsbereichen und auch in rauen Flachwasserumgebungen mit Gebieten mit hoher Stromstärke und geringer Sicht, daher ist es unerlässlich, dass Einheiten mit höherer Leistung mit hochspezialisierten und zuverlässigen Eingriffsmöglichkeiten zur Verfügung stehen sind in der Lage, effizient über alle Umweltbedingungen in den Bereichen Erdöl und Erdgas sowie erneuerbare Energien zu arbeiten. Wir sehen Möglichkeiten, unser Serviceangebot zu verbessern, indem Fernoperationen, Autonomie und Unterwasserresidenz (über gebietsansässige ROVs) auf den Markt gebracht werden.
 Ein Millennium-ROV erholte sich aus dem Wasser. Mit freundlicher Genehmigung von Oceaneering International
Ein Millennium-ROV erholte sich aus dem Wasser. Mit freundlicher Genehmigung von Oceaneering International
Wie arbeitet Oceaneering, um diese Lücken zu füllen?
Wir haben ein starkes Team, spezialisiert auf Technologie und Produktentwicklung, das an der nächsten Fahrzeuggeneration arbeitet, die Residenzen, Roboter und autonome Funktionen umfassen wird. Wir entwickeln diese Technologie jetzt in einem fortgeschrittenen Stadium und erwarten, dass wir eines unserer Fahrzeuge der nächsten Generation im dritten Quartal 2019 testen werden.
Vor kurzem führten wir eine Demonstration von Remote-Operationen und autonomem Docking im Golf von Mexiko durch, wo wir einen ferngesteuerten ROV, der an Bord eines Bohrgeräts stationiert war, von unserem Operationszentrum in Houston aus pilotierten und gleichzeitig autonome Docking-Funktionen ausführten. Die Technologie der Fernsteuerung ist in der Nordsee, in der wir eine Reihe von Verträgen haben, im Einsatz und ist derzeit in Betrieb. Wir steuern ROVs von unserem Missionsunterstützungszentrum in Stavanger, Norwegen aus der Ferne. Dieses Zentrum hat es uns ermöglicht, die ROV-Aktivitäten im Offshore-Bereich durch Onshore-Aktivitäten zu ergänzen. Dieselben erfahrenen Piloten arbeiten im Rotationsbetrieb zwischen Offshore- und Onshore-Standorten. Dies ist eine neue Arbeitsweise.
Um dies zu erreichen, muss unsere Ausrüstung zuverlässig sein. Wir investieren beträchtliche Energie und Ressourcen in die Verbesserung der Systemzuverlässigkeit sowie die Qualifizierung von Komponenten und Materialien, so dass die heutigen ROVs zu residenten Unterwasserfahrzeugen werden können, die ferngesteuert werden können und wartungsfrei betrieben werden können.
Was zählt für Sie als wichtigste Technologie oder Technologietrend, die ROVs effizienter und kostengünstiger gemacht hat?
Software und Steuerungssysteme - beides geht Hand in Hand. Sie ermöglichen uns die Optimierung der ROV-Energieverwaltungssysteme sowie Navigation, Stationsverwaltung, Manipulatoraufgaben, Sensoren, Eingriffsinstrumente und Systemdiagnose, was zu einer Verbesserung der Leistung und Effizienz führt. Die kontinuierliche Entwicklung von Software und Steuersystemen sind Schlüsselkomponenten für die Unterwassersiedlung und autonome Eingriffe.
Es gibt auch maschinelles Lernen und Machine Vision. Wie ich bereits erwähnt habe, haben wir an automatisierten Vorgängen wie dem automatischen Andocken gearbeitet, bei denen der ROV-Pilot das ROV anweisen kann, sich autonom zu einem Andockpunkt zu bewegen, indem ein Cursor auf dem Bildschirm bewegt wird, ohne dass der Joystick eingreifen muss. Die in die Steuerungs- und Trägheitsnavigationssysteme eingebundene Machine Vision-Erkennungssoftware ermöglicht es, diese Aufgaben konsistent auszuführen. Dies ist immer noch eine aufstrebende Technologie, und es dauert etwas, bis sie autonom anlegt. Die Realität heute ist, dass ein wirklich guter Pilot dies schneller tun könnte, jedoch nicht unbedingt ständig und wiederholt. Die Technologie entwickelt sich weiter, aber ich erwarte, dass die automatischen Docking- und Eingriffsvorgänge in naher Zukunft schneller und konsistenter werden und effizientere und zuverlässigere Abläufe ermöglichen.
Die Telemetrie, Steuersysteme und Kommunikationsverbindungen für ROVs sind ebenfalls weit fortgeschritten. Dank schnellerer Kommunikation und zuverlässiger Telemetrie-, Steuerungssysteme und Softwareentwicklungen können wir an unseren heutigen Standort gelangen und werden uns dahin bringen, wohin wir gehen.
Entwickelt Oceaneering seine Software und Steuersysteme im eigenen Haus?
Das ist ein wesentliches Unterscheidungsmerkmal für Oceaneering: Wir haben eigene Softwareentwicklungsteams im eigenen Haus. Alle unsere Steuerungssoftware wird von unseren Mitarbeiteringenieuren entwickelt. Derzeit entwickeln wir die fortschrittliche Software, mit der ROVs der nächsten Generation und autonome Unterwasserfahrzeuge (AUVs) betrieben werden. Unsere derzeitige Flotte wird mit unserer eigenen Software und Steuerungssystemen betrieben, und ich erwarte, dass unsere zukünftigen Fahrzeuge mit unseren Software- und Steuerungssystemen der nächsten Generation laufen werden. Derzeit lagern wir keine dieser Entwicklungen aus. Wir sind jedoch nicht abgeneigt, mit anderen Unternehmen zusammenzuarbeiten, die über einzigartige Fähigkeiten verfügen. Wir sind immer offen und auf der Hut, aber im Moment haben wir unsere eigene Entwicklung geplant.
Was sind die vorherrschenden technischen Trends, die das Design und die Entwicklung von ROVs heute bestimmen? Was brauchen Sie für diese Fahrzeuge, die sie derzeit nicht tun können?
Um das Thema Wohnsitz und Autonomie aufrechtzuerhalten, gibt es seit langem elektrische ROVs, aber fortlaufende Fortschritte bei elektrischen Systemen und Batterietechnologie werden ein äußerst wichtiger Faktor sein, der eine größere Reichweite, längere Lebensdauer und komplexere autonome Vorgänge ermöglicht, was letztendlich zu einem erheblichen Ergebnis führt Reduzierung der Tage an der Oberfläche. Wenn unsere Kunden weniger Schiffstage für die Unterstützung der Entwicklung, des Betriebs und der Wartung vor Ort nutzen können, werden wir die Gesamtbetriebskosten senken und neue Möglichkeiten eröffnen.
Robuste Kommunikationssysteme sind ein weiteres wichtiges Bedürfnis - in der Nordsee gab es vor einigen Jahren keine 4G-Netze, und jetzt gibt es eine Abdeckung von nahezu 100%. Bald kommen 4G-Netzwerke in den Golf von Mexiko. Kommunikationsnetze expandieren in die Felder und Verbesserungen der Satellitentechnologien. Hinzu kommen Verbesserungen bei den Unterwassertechnologien. Diese drei Komponenten eröffnen ein neues Operationsfeld für Autonomie und Fernbetrieb.
 E-ROV-Fahrzeug von Oceaneering. Mit freundlicher Genehmigung von Oceaneering International
E-ROV-Fahrzeug von Oceaneering. Mit freundlicher Genehmigung von Oceaneering International
Echtzeit-Datenverarbeitung und Unterwasser-Imaging bilden einen weiteren wichtigen Bereich - die Integration der Kameras und Sensoren in die ROVs, um eine Echtzeit-3D-Abbildung von Strukturen zu ermöglichen, die direkt an Ingenieure an Land kommuniziert werden, sodass sie schnell Entscheidungen über die Integrität von Assets treffen können. Die Bilder können auch in eine Virtual-Reality-Umgebung integriert werden, um das Feld effektiv zu digitalisieren und die Navigation unter Wasser zu verbessern. Traditionelle Methoden verwenden Sonar- und Akustiknavigation, aber die virtuelle Realität ist hier und wird immer weiter entwickelt. Im weiteren Verlauf werden 3D-Bilder von bestimmten Feldern und anderen Standorten erstellt. Virtuelle Realität wird an der Oberfläche verwendet, und seine Fähigkeiten erweitern den Unterwasserbereich. Derzeit arbeiten wir an einem Projekt zur Verbesserung der 3D-Bildgebungsfunktionen in Unterwasser in Echtzeit. Sie schneiden die Datenverarbeitung aus, so dass die Verarbeitung sofort erfolgt ist. Die Suche nach Anomalien wurde in der Vergangenheit nach der Verarbeitung durchgeführt, was Zeit in Anspruch nimmt und zusätzliche Gefäßtage und Personentage umfasst. Wenn dies auf der Baustelle in Echtzeit erfolgen kann, wird es effizienter und natürlich kostengünstiger.
Welche Entwicklung oder Verbesserung der ROVs - Fahrzeug, Bedienelemente oder Zubehör - möchten Sie am liebsten sehen?
Es ist ein Gleichgewicht zwischen hydraulischen und elektrischen Antriebssystemen. Wir werden elektrische Manipulatoren im Einsatz sehen, die die Abhängigkeit von hydraulischen Systemen reduzieren. ROVs erfordern heutzutage noch einige Hochleistungspumpen und Eingriffsmöglichkeiten. Dies ist die Herausforderung zwischen rein elektrischen Systemen und hydraulischen Systemen. Heute bieten elektrische Manipulatoren beispielsweise weniger als 50% der Hubfähigkeit und Effizienz eines hydraulischen Manipulators.
Wir sprechen hier speziell von ROVs, aber entscheidende Komponenten des ROV-Systems sind die Handhabungssysteme und die Zuverlässigkeit der Tiefwasser-Nabelschnur. Oceaneering hat einen erheblichen Betrag in die Forschung und Entwicklung (F & E) der Planung und Wartung von Nabelschnüren investiert. Infolgedessen konnten wir bessere Wartungspläne implementieren, die zu einer verbesserten Lebenserwartung, niedrigeren Wartungskosten und einer verbesserten Lebenserwartung unserer Versorgungskabel und Handhabungssysteme führen. Im automatisierten Bereich sehen wir uns letztendlich auch auf automatisierte Start- und Wiederherstellungssysteme vor.
Wenn Sie heute auf den Markt schauen, was sehen Sie? Wo sehen Sie die Gelegenheit?
Die Möglichkeiten bestehen in den zuvor genannten Themen. Wir sind wie alle anderen von diesem anhaltenden Abschwung betroffen. Wir sind eine schlankere und effizientere Organisation. Wir haben eine bedeutende geografische Verteilung auf der ganzen Welt. Die Möglichkeiten liegen in der Zusammenarbeit mit unseren Kunden, um nicht nur die Kosten ihrer Feldentwicklungen zu senken, sondern auch die Betriebskosten ihrer Felder zu senken. Wir entwickeln unsere nächste Generation von Fahrzeugen, um an diesen Themen teilzunehmen: Autonomie und Fernbetrieb, Aufenthaltsort und Zuverlässigkeit dieser Systeme.
Unsere Branche hat sich strukturell verändert. Wir leben in einem niedrigen Ölpreisumfeld, und dies ist die neue Norm. Wir gestalten unsere Systeme und Serviceangebote so, dass sie in diesem Umfeld mit niedrigem Ölpreis rentabel und nachhaltig sind.
Wie hat dieser Offshore-Energieeinbruch die Oceaneering ROV-Einheit maßgeblich beeinflusst? Wie unterscheidet es sich heute von vor vier Jahren?
Wir sind heute eine schlankere Organisation mit konsolidierten Gruppen und unterstützenden Funktionen. Wir sind effizienter und halten strategische Standorte auf der ganzen Welt. Eine dedizierte Installationsgruppe, die sich nur mit der Installation, Reaktivierung und Demobilisierung von Systemen befasst, ist für unser Unternehmen wichtig. Heute haben wir vor dem Abschwung weniger als 50% der Onshore-Support-Gruppe, dennoch bedienen wir unsere Kunden und unser Geschäft effizient. Durch die Implementierung von Operational-Excellence-Initiativen konnten wir unseren Betrieb weltweit rationalisieren.
Zu einem bestimmten Zeitpunkt, vor dem Abschwung, stellten wir ROVs etwa pro Woche her. Es gab jedoch Überkapazitäten auf dem Markt, daher haben wir uns auf die Modernisierung und Modernisierung bestehender Geräte konzentriert. Anstatt neue ROVs zu bauen, haben wir unsere bestehende Flotte auf den neuesten Stand gebracht und durch die Einführung modernster Technologien weiterentwickelt.
Auch bei Mobilisierungs- und Demobilisierungsaktivitäten sind wir wesentlich effizienter geworden. Vor dem Abschwung würden wir ROVs für einen Zwei- oder Dreijahresvertrag mobilisieren. Die neue Realität sieht kürzere Verträge vor, bei denen beispielsweise dreiwöchige und dreimonatige Verträge üblich sind. Wir haben auch viel Zeit darauf verwendet, unsere Installations- und Reaktivierungsprozesse zu verbessern.
Wir konzentrieren unsere Kapitalinvestitionen und unsere F & E-Ausgaben auf ausgewählte Projekte. Wir hören unseren Kunden zu, wie bereits gesagt, und wir sind zuversichtlich, dass wir in die richtige Richtung gehen. Wir haben eine fünfjährige Technologie-Roadmap, die in diesem Zeitraum eingeführt wird. Der erste Erfolg ist unser eigenständiger, batteriebetriebener E-ROV-Vertrag. Dieses Konzept stößt in der Industrie auf großes Interesse und wir sehen in naher Zukunft mehr Möglichkeiten für E-ROV in Feldarbeit und Bohrunterstützung. Bis 2019 und 2020 werden wir weitere technologische Fortschritte aus unserem Portfolio herausholen.
Besprechen Sie bitte ein oder zwei Fallstudien, von denen Sie glauben, dass sie die Fähigkeiten Ihres ROV-Geräts am besten veranschaulichen.
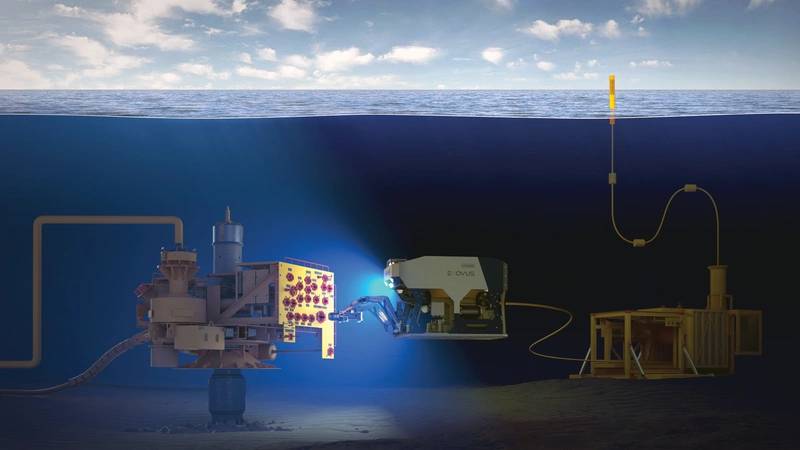
Wir haben einen Auftrag von einem großen Betreiber in der Nordsee erhalten, die erste Version unseres residenten Fahrzeugs, das E-ROV, einzusetzen, das für „Empowered ROV“ steht. Das E-ROV ist ein residentes, batteriebetriebenes ROV gehen Sie mit einer Oberflächenboje Unterwasser. Es ist ein Elektrofahrzeug der Arbeitsklasse mit einem Hydraulikaggregat, das die Manipulatorfunktionen unterstützt, und es wird von unserem Onshore-Missionsunterstützungszentrum aus ferngesteuert. Die Kommunikation erfolgt über das 4G-Breitbandnetzwerk unter Verwendung einer selbstaufgestellten Oberflächenboje. Wir sind sehr stolz auf diese Leistung. Im Anschluss an den ursprünglichen Umfang haben wir einen Dreijahresvertrag mit Optionen vom selben Kunden erhalten, bei dem der E-ROV an verschiedenen Standorten und Arbeitsbereichen eingesetzt wird und mehrere Bereiche bedient. Das E-ROV kann an einem bestimmten Ort von einem Gelegenheitsschiff mit einer sich selbst ausrichtenden Boje an einem bestimmten Ort platziert werden, und es kann auf ähnliche Weise von einem Gelegenheitsschiff geborgen und innerhalb von 48 Stunden an einen anderen Ort versetzt werden.
Es war eine weltweite Anstrengung, das E-ROV-System zu entwickeln, das die Expertise einer Reihe von Gruppen innerhalb von Oceaneering vereint. Wir glauben, dass dies ein bedeutender technologischer Fortschritt für die nächste Etappe der Unterwasser-ROV ist. Unsere nächste Fahrzeuggeneration (das Freedom ROV) wird durch eine Dockingstation am Meeresgrund unterstützt und verfügt über eine Hybridfunktionalität, die es ermöglicht, in zwei Modi zu arbeiten: per Fernsteuerung per Seilzug, um Echtzeitsteuerung bereitzustellen - oder in einem autonomer und kabelloser Modus mit Batteriestrom.
Was ist die derzeitige Laufzeit des E-ROV?
Das E-ROV ist derzeit batteriebetrieben, kann jedoch auch an eine Unterwasserstromquelle angeschlossen werden, um eine unbegrenzte Dauer zu haben. Die derzeitige batteriebetriebene Untersee-Residenz ist auf drei Monate ausgelegt, aber wir arbeiten daran, dies zu verlängern. Unser Fahrzeug der nächsten Generation wird für sechs Monate ausgelegt.
Die Dauer hängt von der Intensität des Interventionsarbeitsbereichs ab, den das E-ROV durchführt. Wenn es rein beobachtend ist, verbraucht es weniger Batteriestrom und hat eine längere Lebensdauer. Wenn es sich um einen manipulativen Eingriff oder um einen Injektionsschlupf handelt, wird mehr Batteriestrom benötigt, was zu einer kürzeren Lebensdauer führt.
Suchen Sie nach anderen Energieoptionen?
Ja, wir erforschen Brennstoffzellen und kinetische Bojen. Offensichtlich funktioniert eine Boje bei Wellenbewegungen, weshalb sie an bestimmten Orten nicht geeignet ist. Es ist möglich, den Strom von selektiv vorhandenen Subsea-Produktionssystemen zu nutzen, und wir arbeiten mit Kunden zusammen, um die Einsatzmöglichkeiten zu untersuchen.
Welche anderen Entwicklungen sind für die Unterwasserresidenz am wichtigsten?
Fortschritte in der Kommunikation über das Wasser sind von entscheidender Bedeutung. Wenn diese Technologie perfektioniert werden kann, eröffnet sie eine andere und direktere Methode der Kommunikation mit dem Unterwasserfahrzeug. Heute müssen AUVs beispielsweise ihre Positionen neu kalibrieren und überprüfen. Wenn wir dies auch unter Wasser tun können, verlängert dies die Dauer und Effizienz einer bestimmten Mission.
Leistung, Zuverlässigkeit und Innovation haben weiterhin Priorität. Die derzeitige Flottenperformance liegt bei über 99%. Mit zwei Industriepreisen im Jahr 2018 für ROV-Technologie und Innovation unter dem Gürtel sind wir zuversichtlich, dass diese Erfolge anhalten werden. Es erfordert dedizierte Ressourcen: Projektplanung, Wartung, Betriebsunterstützung, Forschung und Entwicklung und natürlich die wichtigste Komponente: unser engagiertes und erfahrenes Team von Fachleuten.
Ist Hormuz halb offen oder halb geschlossen? Tankerraten erholen sich

CMA CGM im ersten Quartal robust, aber die Margen in der Schifffahrt verknappen sich angesichts geopolitischer Turbulenzen

174K LNG-Schiff getauft; Vorstand genehmigt neuen Plan für 8 Schiffe

MISC benennt LNG-Tanker-Schiffspaar

Am Steuer: Wie die US-Küstenwache die Zukunft der maritimen Kernenergie gestaltet

Trump setzt Bemühungen zur Eskortierung von Schiffen in der Straße von Hormuz aus.
")
Das Projekt Freedom hat einen schwierigen Start

Trump: Die USA werden helfen, in der Straße von Hormus gestrandete Schiffe zu befreien.
-führt-April-der-170280 "Die USS Abraham Lincoln (CVN 72) führt am 16. April Blockadeoperationen der USA im Arabischen Meer durch. (Foto der US Navy)")



